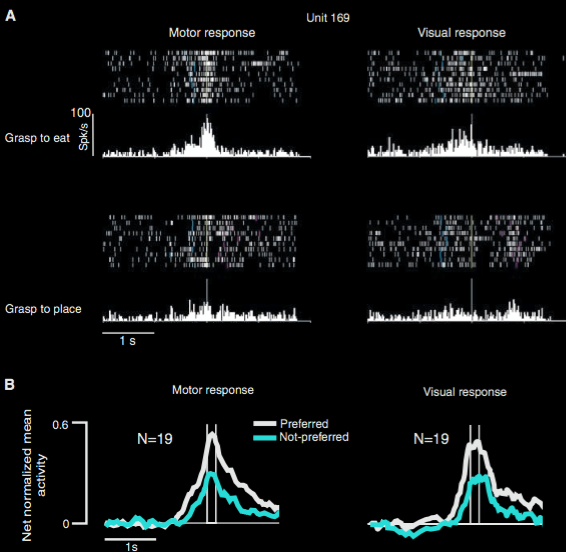
Fogassi et al 2005, figure 5
Motor Representation
What follows rests on three background assumptions about the control of action.
First, I follow \citet{jeannerod_motor_2006} and others in rejecting the view that all motor representations specify only bodily configurations, joint displacements and end states.
Instead some motor representations specify outcomes to which actions are directed,
such as the grasping of a particular handle or the transporting of a given object.
Second, some motor processes involve computing means from ends and generating sensory expectations concerning the effects of actions \citep[e.g.][]{Wolpert:2003mg}.
Third, multiple means--ends computations can occur simultaneously, or at least rapidly enough for action preparation to involve selection on the basis of multiple means-ends computations
\citep[e.g.][]{wolpert_internal_1998}.
Suppose you are reaching for, grasping, transporting and then placing a pen. Performing even
relatively simple action sequences like this involves satisfying many constraints that cannot
normally be satisfied by explicit practical reasoning, especially if performance is to be rapid and
fluent. Rather, such performances require motor representations.
These representations are paradigmatically involved in preparing, executing and monitoring actions.%
\footnote{%
See \citet{wolpert:1995internal, miall:1996_forward, jeannerod:1998nbo, zhang:2007_planning}.
Note that motor representations sometimes occur in an agent who has prepared an action and is required (as it turns out) not to perform it: although she has prevented herself from acting, motor representations specifying the action persist, perhaps because they are necessary for monitoring whether prevention has succeeded \citep{bonini:2014_ventral}.
}
But they also live a double life. Motor representations concerning a particular type of action are
involved not only in performing an action of that type but also sometimes in observing one. That is,
if you were to observe Ayesha reach for, grasp, transport and then place a pen, motor representations
would occur in you much like those that would also occur in you if it were you---not Ayesha---who was
doing this.
Converging evidence for this assertion comes from a variety of methods and measures;
but I won’t mention any of that here.
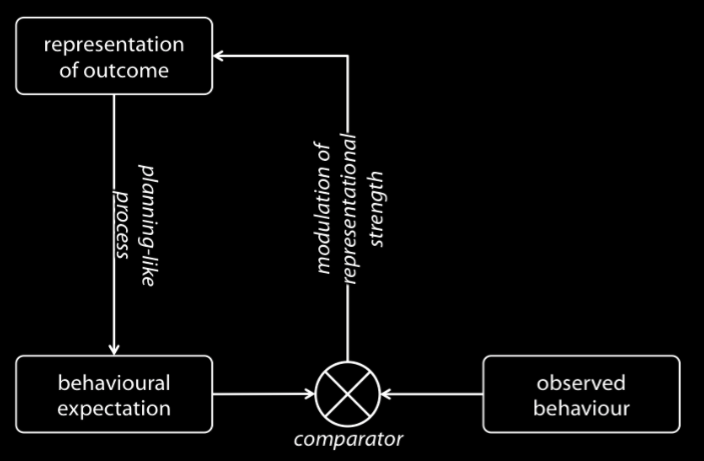
Sinigalia & Butterfill 2015, figure 1
Goal-tracking is acting in reverse.
-- in action observation, possible outcomes of observed actions are represented
-- these representations trigger planning as if performing actions directed to the outcomes
-- such planning generates predictions
-- a triggering representation is weakened if its predictions fail
The result is that the only only outcomes to which the observed action is a means
are represented strongly.
There is evidence that a motor representation of an outcome can cause a determination of which movements are likely to be performed to achieve that outcome \citep[see, for instance,][]{kilner:2004_motor, urgesi:2010_simulating}. Further, the processes involved in determining how observed actions are likely to unfold given their outcomes are closely related, or identical, to processes involved in performing actions.
This is known in part thanks to studies of how observing actions can facilitate performing actions congruent with those observed, and can interfere with performing incongruent actions \citep{
brass:2000_compatibility,
craighero:2002_hand,
kilner:2003_interference,
costantini:2012_does}.
Planning-like processes in action observation have also been demonstrated by measuring observers' predictive gaze. If you were to observe just the early phases of a grasping movement, your eyes might jump to its likely target, ignoring nearby objects \citep{ambrosini:2011_grasping}. These proactive eye movements resemble those you would typically make if you were acting yourself \citep{Flanagan:2003lm}.
Importantly, the occurrence of such proactive eye movements in action observation depends on your
representing the outcome of an action motorically; even temporary interference in the observer's
motor abilities will interfere with the eye movements \citep{Costantini:2012fk}.
These proactive eye movements also depend on planning-like processes; requiring the observer to
perform actions incongruent with those she is observing can eliminate proactive eye movements
\citep{Costantini:2012uq}. This, then, is further evidence for planning-like motor processes in
action observation.
So observers represent outcomes motorically and these representations trigger planning-like processes
which generate expectations about how the observed actions will unfold and their sensory consequences.
Now the mere occurrence of these processes is not sufficient to explain why, in action observation,
an outcome represented motorically is likely to be an outcome to which the observed action is
directed.
To take a tiny step further, we conjecture that, in action observation, \textbf{motor representations of
outcomes are weakened to the extent that the expectations they generate are unmet}
\citep[compare][]{Fogassi:2005nf}.
A motor representation of an outcome to which an observed action is not directed is likely to
generate incorrect expectations about how this action will unfold, and failures of these
expectations to be met will weaken the representation.
This is what ensures that there is a correspondence between outcomes represented motorically in
observing actions and the goals of those actions.
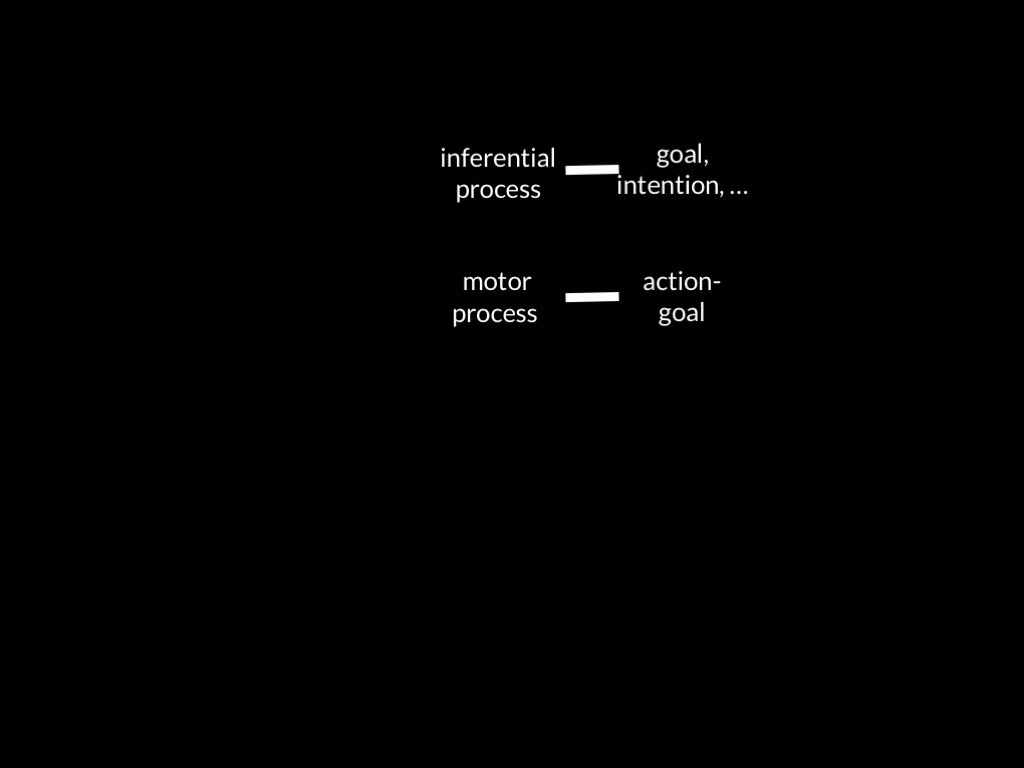
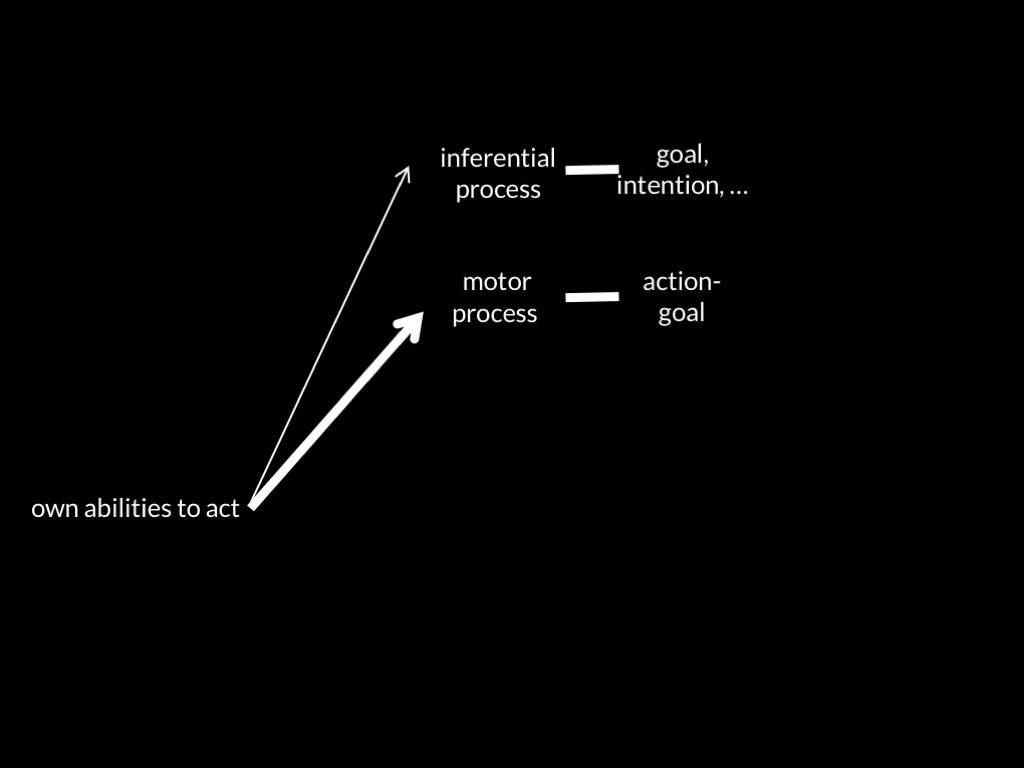
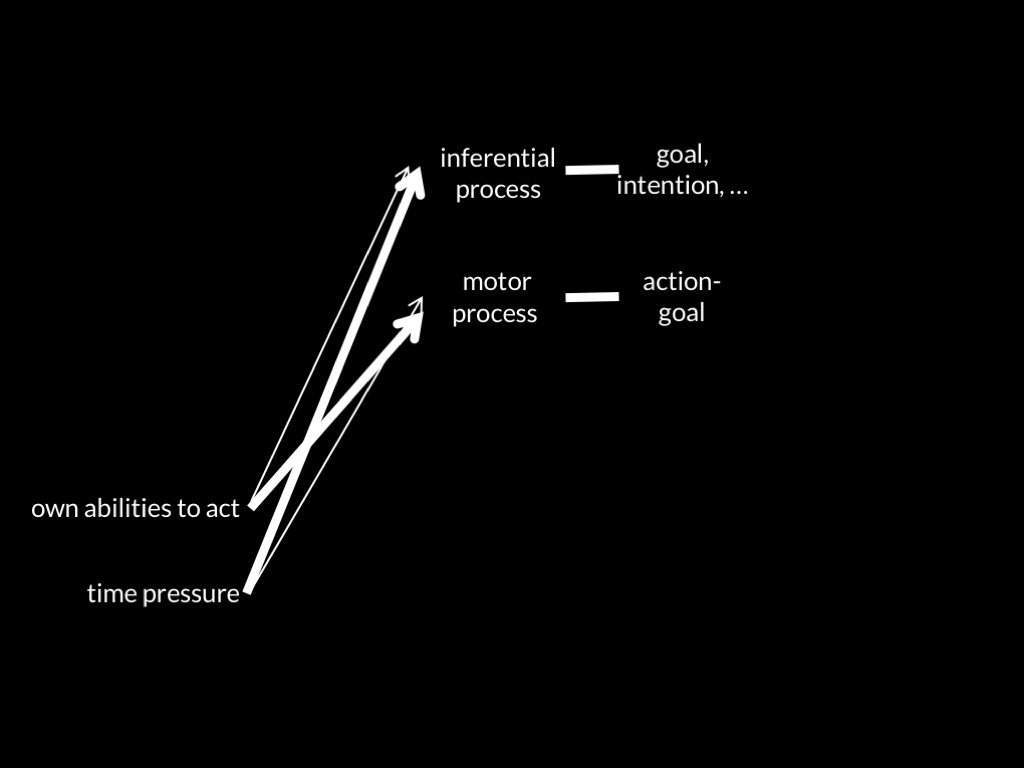
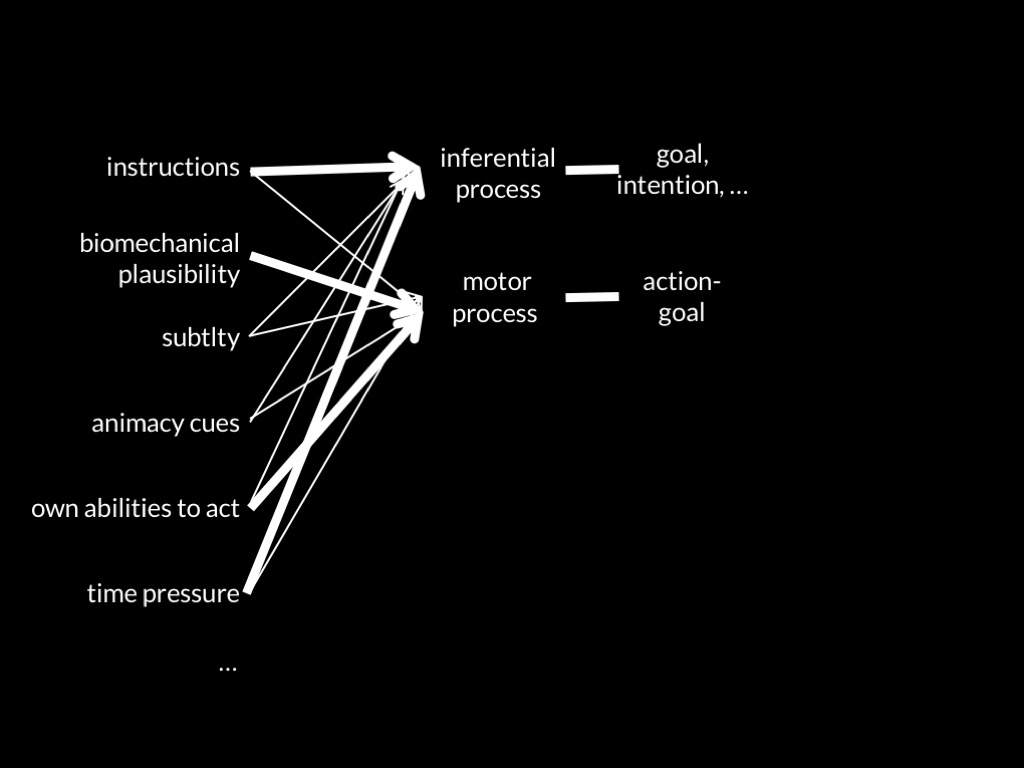
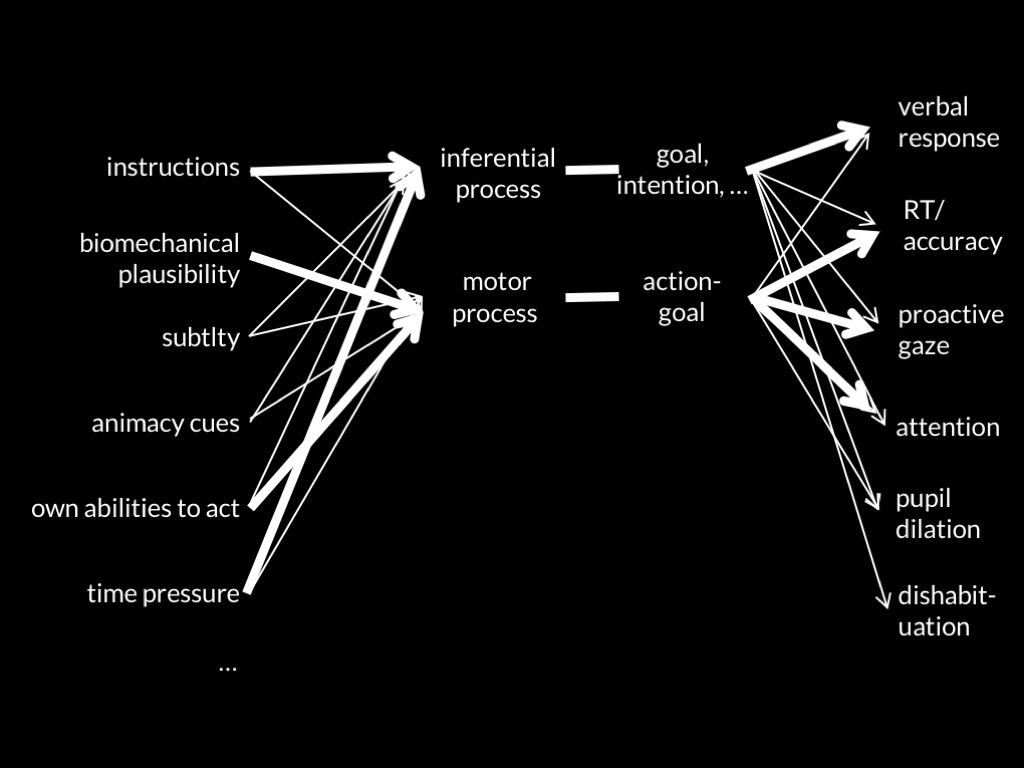
‘proactive gaze’ and ‘explicit judgement’ are variables whose values represent
whether there is a proactive gaze or explicit judgement, and what is it to or about.
Likewise, ‘motor process’ is a variable whose values represent ...
The lines depict how the variables are causally related. I’ve used thick and thin
lines informally, to indicate weaker and stronger influences.
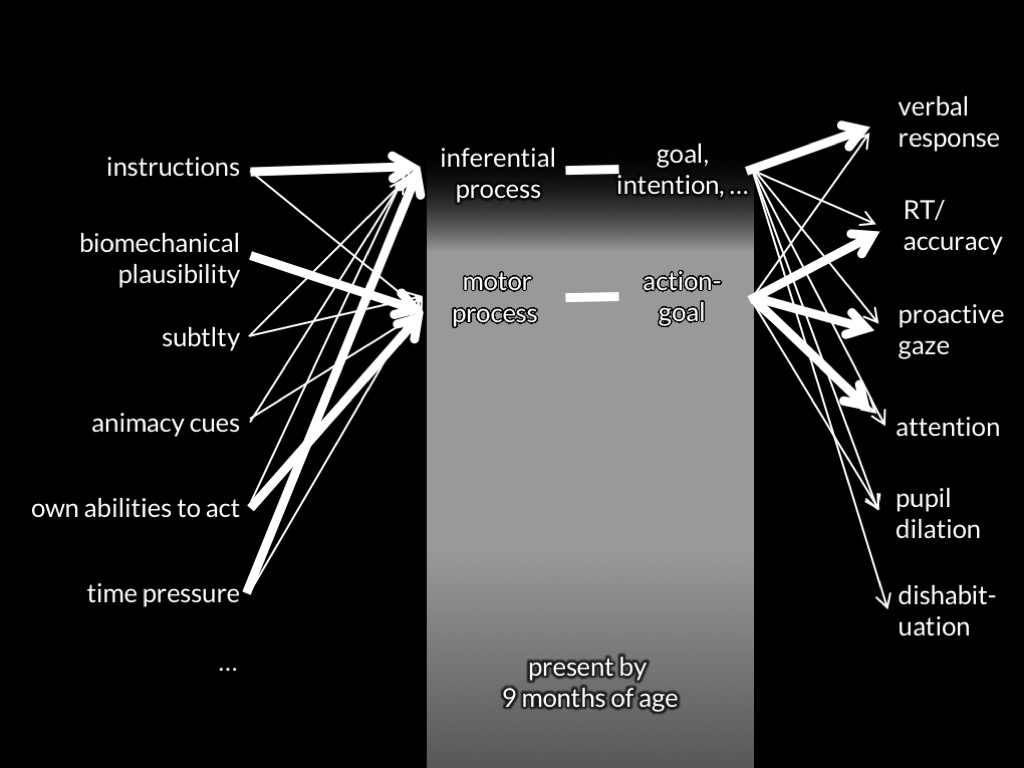
The dual-process theory of goal-tracking makes perfect sense of development.
It says that what we observe in six- and nine-month-olds is motor-based goal-tracking.
Presumably the more flexible, reasoning-based goal-tracking processes emerge some time
later in development.